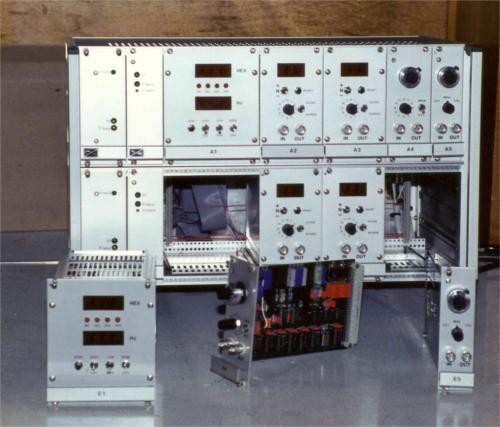
This robot interface formed a link between a computer and the 2-axis robotic arm. To go back to my LinkedIn page click here. |
||
 |
||||
This interface has been developed as a link between a control computer and a 2-axis robot arm and fulfilled a variety of functions. For testing and fault finding of the robotic arm, processing could be stepped. All measured variables of the robot arm were conditioned and displayed. Micro-controllers were used to sample and display analogue variables such as the hydraulic pressure of the fluid driving the hydraulic motors. The interface also provided the drivers for the hydraulic valves for controlling the hydraulic motors. |
||||